Publications
2025
-
 Trajectory Planning and Control for Robotic Manipulation of Magnetic CapsulesOgulcan Isitman, Gokhan Alcan, and Ville KyrkiIEEE Robotics and Automation Letters, 2025
Trajectory Planning and Control for Robotic Manipulation of Magnetic CapsulesOgulcan Isitman, Gokhan Alcan, and Ville KyrkiIEEE Robotics and Automation Letters, 2025Robotic magnetic manipulation offers a minimally invasive approach to gastrointestinal examinations through capsule endoscopy. However, controlling such systems using external permanent magnets (EPM) is challenging due to nonlinear magnetic interactions, especially when there are complex navigation requirements such as avoidance of sensitive tissues. In this work, we present a novel trajectory planning and control method incorporating dynamics and navigation requirements, using a single EPM fixed to a robotic arm to manipulate an internal permanent magnet (IPM). Our approach employs a constrained iterative linear quadratic regulator that considers the dynamics of the IPM to generate optimal trajectories for both the EPM and IPM. Extensive simulations and real-world experiments, motivated by capsule endoscopy operations, demonstrate the robustness of the method, showcasing resilience to external disturbances and precise control under varying conditions. The experimental results show that the IPM reaches the goal position with a maximum mean error of 0.18 cm and a standard deviation of 0.21 cm. This work introduces a unified framework for constrained trajectory optimization in magnetic manipulation, directly incorporating both the IPM’s dynamics and the EPM’s manipulability.
@article{isitman2025trajectory, title = {Trajectory Planning and Control for Robotic Manipulation of Magnetic Capsules}, author = {Isitman, Ogulcan and Alcan, Gokhan and Kyrki, Ville}, journal = {IEEE Robotics and Automation Letters}, year = {2025}, publisher = {IEEE}, dimensions = {true}, } -
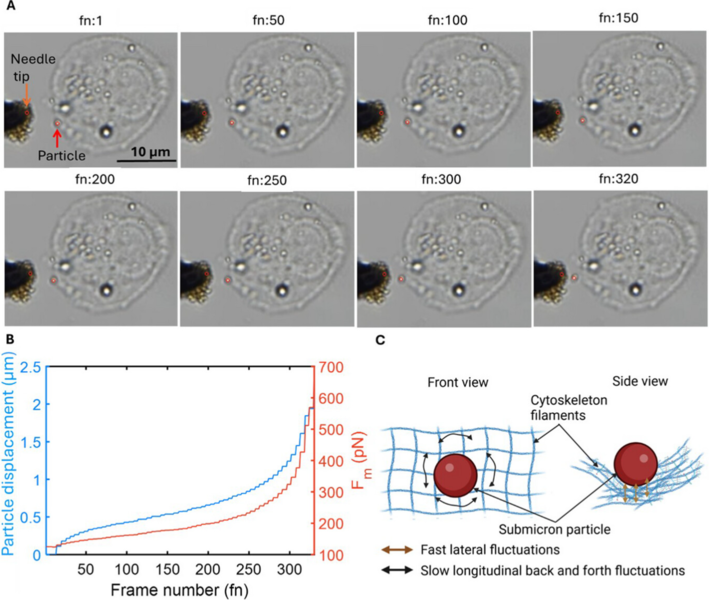 Probing Early Particle-Cell Membrane Interactions via Single-Cell and Single-Particle Interaction AnalysisHouari Bettahar, Christos Tapeinos, Oğulcan Işıtman, and 4 more authorsAdvanced Functional Materials, 2025
Probing Early Particle-Cell Membrane Interactions via Single-Cell and Single-Particle Interaction AnalysisHouari Bettahar, Christos Tapeinos, Oğulcan Işıtman, and 4 more authorsAdvanced Functional Materials, 2025Endocytosis is vital for nutrient uptake and nanomedicine applications, but the biophysics of the pre-internalization phase remains poorly understood at single-cell level. This study uses advanced robotic techniques to analyze pre-internalization adhesion mechanics. MiaPaCa-2 cells, pancreatic cancer, displayed three interaction phases: rapid lateral displacement, a quasi-plateau phase, and linear displacement during extraction. Adhesion time is linked to changes in cell mechanics, with MiaPaCa-2 cells displaying a biphasic uptake process—an initial rapid adhesion phase followed by a strengthening of adhesion high variability in viscoelasticity. In contrast, fibroblasts show a gradual increase in adhesion forces, accompanied by significant rises in stiffness and viscosity. Unlike traditional endocytosis studies, this study focuses on how pathway inhibitors alter initial membrane engagement rather than uptake mechanisms. Clathrin inhibition increased adhesion by 39%, caveolae inhibition by 27%, and microtubule inhibition reduced adhesion by 48%, indicating microtubules’ role in adhesion dynamics. Combined inhibition of clathrin, caveolae, and microtubules reduced adhesion by 70%, showing that disrupting multiple pathways severely impairs particle adhesion. Under repeated stress, MiaPaCa-2 cells soften (≈75% Young’s modulus reduction) due to cytoskeletal disruption, while fibroblasts gradually soften (≈71% modulus reduction), highlighting cellular adaptations. These findings provide new insights into the pre-internalization of particles at the single-cell level.
@article{bettahar2025probing, title = {Probing Early Particle-Cell Membrane Interactions via Single-Cell and Single-Particle Interaction Analysis}, author = {Bettahar, Houari and Tapeinos, Christos and I{\c{s}}{\i}tman, O{\u{g}}ulcan and D'Amico, Carmine and Correia, Alexandra and Santos, H{\'e}lder A and Zhou, Quan}, journal = {Advanced Functional Materials}, pages = {2507301}, year = {2025}, publisher = {Wiley Online Library}, dimensions = {true}, }


2022
-
 Simultaneous and Independent Micromanipulation of Two Identical Particles with Robotic Electromagnetic NeedlesOgulcan Isitman, Hakan Kandemir, Gokhan Alcan, and 2 more authorsIn 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2022
Simultaneous and Independent Micromanipulation of Two Identical Particles with Robotic Electromagnetic NeedlesOgulcan Isitman, Hakan Kandemir, Gokhan Alcan, and 2 more authorsIn 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2022Magnetic manipulation of particles at close vicinity is a challenging task. In this paper, we propose simultaneous and independent manipulation of two identical particles at close vicinity using two mobile robotic electromagnetic needles. We developed a neural network that can predict the magnetic flux density gradient for any given needle positions. Using the neural network, we developed a control algorithm to solve the optimal needle positions that generate the forces in the required directions while keeping a safe distance between the two needles and particles. We applied our method in five typical cases of simultaneous and independent microparticle manipulation, with the closest particle separation of 30 μm.
@inproceedings{isitman2022, title = {Simultaneous and Independent Micromanipulation of Two Identical Particles with Robotic Electromagnetic Needles}, author = {Isitman, Ogulcan and Kandemir, Hakan and Alcan, Gokhan and Cenev, Zoran and Zhou, Quan}, booktitle = {2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)}, pages = {1--6}, year = {2022}, organization = {IEEE}, doi = {10.1109/MARSS55884.2022.9870468}, dimensions = {true} }

2021
-
 Non-contact cooperative manipulation of magnetic microparticles using two robotic electromagnetic needlesOğulcan Işıtman, Houari Bettahar, and Quan ZhouIEEE Robotics and Automation Letters, 2021
Non-contact cooperative manipulation of magnetic microparticles using two robotic electromagnetic needlesOğulcan Işıtman, Houari Bettahar, and Quan ZhouIEEE Robotics and Automation Letters, 2021In this paper, we report a cooperative manipulation method for non-contact robotic electromagnetic needle manipulation system. We employ two 3 degrees of freedom (DOF) robotic electromagnetic needles to achieve an over-actuated manipulator, which can move the particle to any position in the planar workspace from any direction. The redundant DOFs, combined with an optimization-based control approach, enable the manipulator to achieve accurate path following and avoid the collision of needles. Using visual servoing, the developed controller can achieve line following accuracy of 0.33±0.32 μm, square following accuracy of 0.77±0.55 μm, and circle following accuracy of 0.89±0.66 μm with a 4.5 μm diameter superparamagnetic particle. The manipulator can also manipulate a particle along complex paths such as infinity symbol and letter symbols.
@article{isitman21, title = {Non-contact cooperative manipulation of magnetic microparticles using two robotic electromagnetic needles}, author = {I{\c{s}}{\i}tman, O{\u{g}}ulcan and Bettahar, Houari and Zhou, Quan}, journal = {IEEE Robotics and Automation Letters}, volume = {7}, number = {2}, pages = {1605--1611}, year = {2021}, publisher = {IEEE}, doi = {10.1109/LRA.2021.3137546}, url = {https://ieeexplore.ieee.org/abstract/document/9661434}, dimensions = {true}, }

2019
-
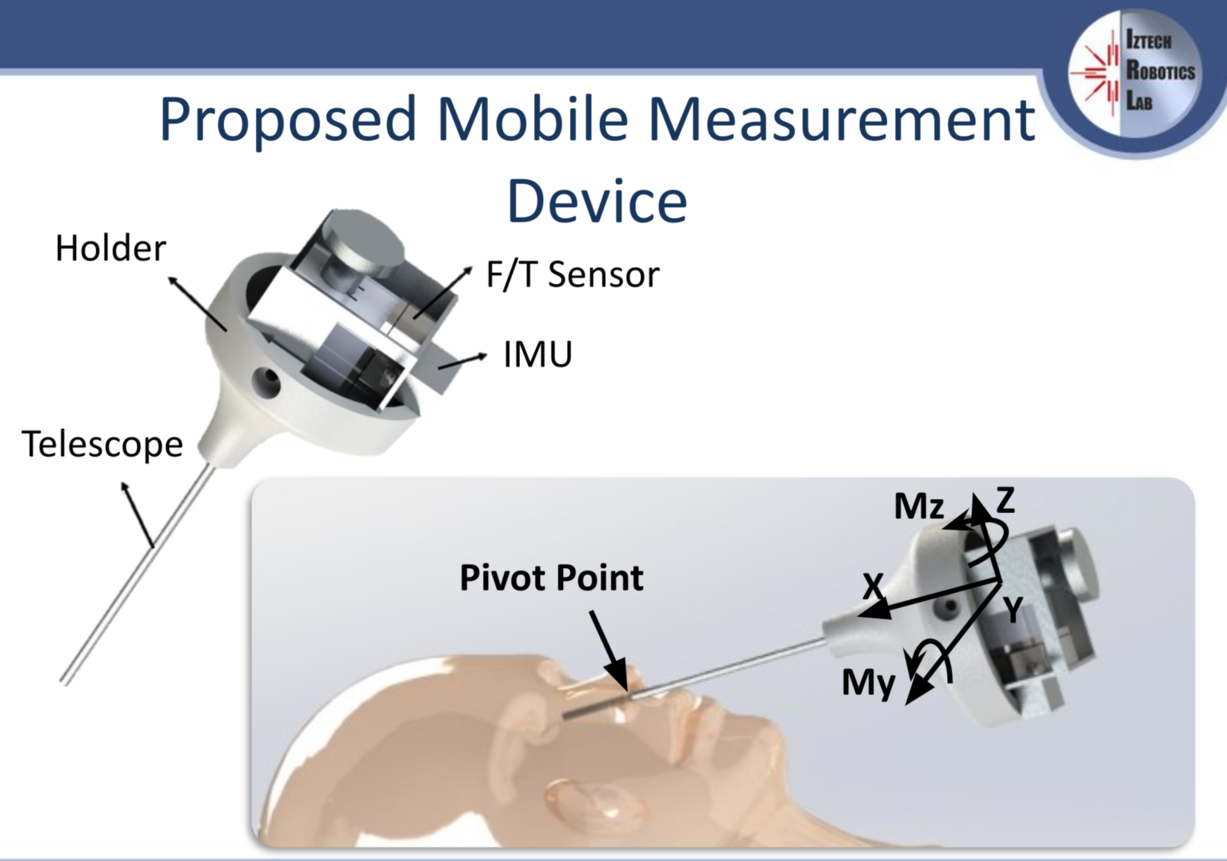 Viscoelastic modeling of human nasal tissues with a mobile measurement deviceOğulcan Işıtman, Orhan Ayit, Eren Vardarlı, and 4 more authorsIn New Trends in Medical and Service Robotics: Advances in Theory and Practice, 2019
Viscoelastic modeling of human nasal tissues with a mobile measurement deviceOğulcan Işıtman, Orhan Ayit, Eren Vardarlı, and 4 more authorsIn New Trends in Medical and Service Robotics: Advances in Theory and Practice, 2019Modeling the dynamic of tool-tissue interaction for the robotic minimally invasive surgeries is one of the main issues for designing appropriate robot controllers. A mobile measurement device is produced in order to model some nasal tissues of a human. This mobile device is a hand-held one which measures the applied moments and relative angular displacements about a fixed pivot point. The ex-vivo measurements are realized by surgeons on a relatively fresh human cadaver head. The tip of the nose and the nasal concha are the two tissues that are investigated. In this study, five different viscoelastic models are considered; Elastic, Kelvin-Voight, Kelvin-Boltzmann, Maxwell and Hunt-Crossley. The results are evaluated and cross-validated on each data set. Hunt-Crossley and Kelvin-Boltzmann models provided the minimum root-mean-square (RMS) error among the other models.
@inproceedings{isitman19, title = {Viscoelastic modeling of human nasal tissues with a mobile measurement device}, author = {I{\c{s}}{\i}tman, O{\u{g}}ulcan and Ayit, Orhan and Vardarl{\i}, Eren and Hanalio{\u{g}}lu, {\c{S}}ahin and I{\c{s}}{\i}kay, {\.I}lkay and Berker, Mustafa and Dede, Mehmet {\.I}smet Can}, booktitle = {New Trends in Medical and Service Robotics: Advances in Theory and Practice}, pages = {216--224}, year = {2019}, organization = {Springer}, doi = {10.1007/978-3-030-00329-6_25}, dimensions = {true} } -
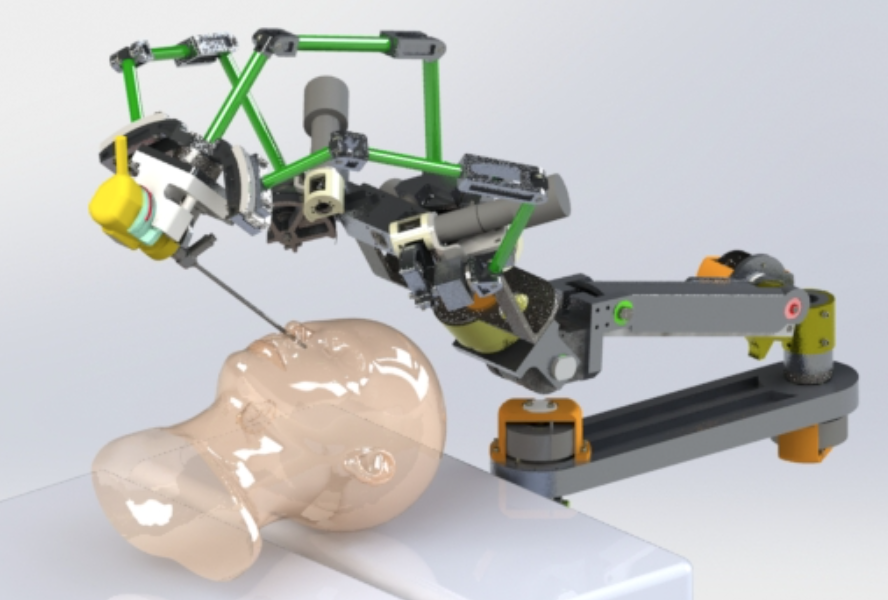
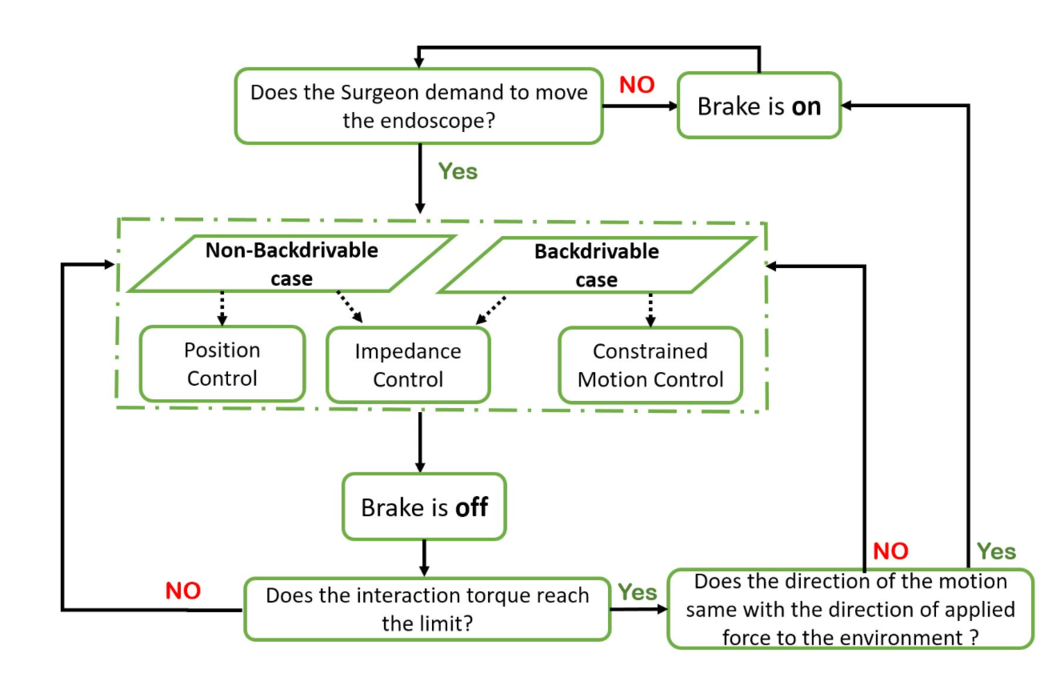 Control methods for a teleoperated endoscope robotOğulcan Işıtman, and Mehmet İsmet Can DedeIn Advances in Mechanism and Machine Science: Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science 15, 2019
Control methods for a teleoperated endoscope robotOğulcan Işıtman, and Mehmet İsmet Can DedeIn Advances in Mechanism and Machine Science: Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science 15, 2019In this study, control of a endoscope robot for the pituitary gland surgery is presented. This co-worker robot has non-backdrivable actuation system with external brakes on the actuators. Since it is required to move in a constrained environment, which is the inside the nostrils in this case, modifications are required for the motion controller. In order to provide safe procedure, the maximum force and torque limits are defined for the real surgical case by using human cadaver head. By considering these limits and application specific requirements, a compliance controller is proposed and experimentally tested.
@inproceedings{isitman2019, title = {Control methods for a teleoperated endoscope robot}, author = {I{\c{s}}{\i}tman, O{\u{g}}ulcan and Dede, Mehmet {\.I}smet Can}, booktitle = {Advances in Mechanism and Machine Science: Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science 15}, pages = {2077--2086}, year = {2019}, organization = {Springer}, doi = {10.1007/978-3-030-20131-9_206}, dimensions = {true}, }


2018
-
 Compliant control of a teleoperated endoscope robotOğulcan IşıtmanIzmir Institute of Technology (Turkey), 2018
Compliant control of a teleoperated endoscope robotOğulcan IşıtmanIzmir Institute of Technology (Turkey), 2018With the advancement of technology, robots have begun to be utilized in numerous medical applications, including minimally invasive surgery. This use aims to address the disadvantages of traditional open surgery procedures. This thesis contributes to a research project titled “Robot-assisted endoscope control that can be manipulated by surgical tools (NeuRobo-Scope),” which focuses on minimally invasive endoscopic surgery of the pituitary gland tumor. During this procedure, a robot handles the endoscope as it maneuvers within the human nasal cavity. The movement of the endoscope is restricted by soft tissues. Another operational scenario involves the surgeon manually repositioning the endoscope by directing the robot that holds the endoscope. This thesis addresses two central research challenges: (1) the interaction between the surgeon and the robot, and (2) the interaction between the robot and soft tissue. Firstly, the dynamics of the interaction between the surgeon and the robot are explored. The effects of various compliant controller parameters are examined using a non-backdrivable experimental setup with a single degree of freedom. A specific task is outlined to quantitatively assess the impact of these parameters on energy efficiency and accuracy. The second research challenge centers on modeling human nasal tissue to design a more precise controller. To gather data from human cadavers, a novel hand-held measurement device has been developed. External forces, moments, and soft tissue models are derived from ex-vivo experiments. Once the soft tissue models are identified, a revised interaction control method is proposed for the teleoperated endoscope holder robot. The surgical procedure in focus is tested with this newly proposed interaction controller using a single-degree-of-freedom experimental setup. The experiments conducted with the proposed controllers have proven successful for the outlined operational scenario. The results indicate the feasibility of motion control for surgical robots operating within constrained environments.
-
 The effects of admittance term on back-drivabilityOgulcan Işıtman, Orhan Ayit, and Mehmet İsmet Can DedeIn Mechanisms, Transmissions and Applications: Proceedings of the Fourth MeTrApp Conference 2017 7, 2018
The effects of admittance term on back-drivabilityOgulcan Işıtman, Orhan Ayit, and Mehmet İsmet Can DedeIn Mechanisms, Transmissions and Applications: Proceedings of the Fourth MeTrApp Conference 2017 7, 2018In the design of kinesthetic haptic devices, there are mainly impedance type and admittance type device. In a customary scenario, the human operator back-drives the haptic device by holding and providing motion to the handle of the haptic device. If the type of transmission system does not allow passive back-drivability, then the back-drivability is satisfied by the use of an admittance controller. This type of a haptic device is said to have admittance structure. The selection of the admittance term in this controller plays a critical part in the task execution performance. Determination of this term is not trivial and the optimal parameters depend on not only the key performance criteria but also on the human operator. An experimental study is carried out in this work to determine the effect of the admittance term parameters on the performance of human operators in terms of the energy efficiency and the best accuracy. In this paper, the experimental set-up and the results of the experiments are presented and discussed.
@inproceedings{isitman2018, title = {The effects of admittance term on back-drivability}, author = {I{\c{s}}{\i}tman, Ogulcan and Ayit, Orhan and Dede, Mehmet {\.I}smet Can}, booktitle = {Mechanisms, Transmissions and Applications: Proceedings of the Fourth MeTrApp Conference 2017 7}, pages = {181--190}, year = {2018}, organization = {Springer}, doi = {10.1007/978-3-319-60702-3_19}, dimensions = {true}, }

